ساخت “ربات شاخک مغناطیسی” راهی نوین برای درمان ریه

ساخت “ربات شاخک مغناطیسی” راهی نوین برای درمان ریه
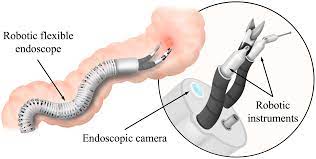
مهندسان و دانشمندان رباتی را که می تواند به برخی از کوچکترین نایژه ها در ریه ها دست یابد – برای نمونه برداری از بافت ها و یا برای تشخیص بیماری سرطان، به روش اثبات مفهومی ایجاد کرده اند.
این ربات که به عنوان یک ربات شاخک مغناطیسی شناخته می شود، تنها ۲ میلی متر قطر دارد و تقریباً دو برابر اندازه نوک یک قلم است.
مهندسان برای هدایت ربات از آهنرباهای بیرونی بیمار استفاده می نمایند.این دستگاه توسط تیمی از مهندسان، دانشمندان و پزشکان مستقر در آزمایشگاه STORM در دانشگاه لیدز ، که در استفاده از سیستمهای روباتیک برای کمک به روشهای آندوسکوپی و کاتتر، جایی که یک لوله ظریف به بدن وارد میشود، پیشگام بوده ، ساخته شده است. این یافته ها در مجله Soft Robotics منتشر شده است.
در روش اثبات مفهومی ابتدا بر اساس آزمایشات آزمایشگاهی یک کپی سه بعدی از کل نایژه های ریه و داده های آناتومیکی ریه الگو برداری می شود. در مرحله بعدی این این مطالعه، اثربخشی دستگاه را در جهت یابی روی ریه های گرفته شده از یک جسد مورد بررسی قرار می گیرد.
محدودیت های تکنولوژی موجود
در حال حاضر، پزشکان از ابزاری به نام برونکوسکوپ برای معاینه ریه ها و مجاری هوا استفاده می کنند. این روش شامل عبور دادن یک ابزار لوله مانند مو قابل انعطاف به قطر حدود ۳.۵ تا ۴ میلی متر از بینی یا دهان و داخل مجرای ریه است.
به دلیل اندازه آن، برونکوسکوپ فقط می تواند تا سطوح بالای درخت برونش حرکت کند.
برای عمیقتر شدن در ریهها، یک کاتتر یا لوله ریز – به قطر حدود ۲ میلیمتر – از برونکوسکوپ و سپس به لولههای کوچکتر ریهها عبور داده میشود. با این وجود پزشکان در نحوه جابجایی برونکوسکوپ دارای محدود هستند چرا که هدایت ابزار و کاتتر به محدوده هدف در ریه که مورد نیاز است کار را برای پزشکان سخت تر می کند. با این حال، ربات شاخک مغناطیسی برای مانورپذیری بیشتر در ریه ها توسعه یافته است و از یک سیستم هدایت رباتیک استفاده می کند که برای هر روش ، شخصی سازی شده است.
پروفسور پیترو والداستری، مدیر آزمایشگاه STORM که بر این تحقیق نظارت داشت، گفت: “روبات یا کاتتر شاخک مغناطیسی که ۲ میلی متر اندازه دارد می توان به صورت مغناطیسی آن را کنترل کرد تا با آناتومی کل ریه ها مطابقت داشته باشد، در واقع با این ربات می توان به بیشتر مناطق ریه دسترسی داشت و می توان این ادعا را کرد که این ربات یک ابزار بالینی مهم در بررسی و درمان سرطان ریه و سایر بیماری های ریوی خواهد بود. پروفسور والداسترای در ادامه این موضوع به ایم مسئله هم اشاره کرد :
“سیستم ما از یک سیستم هدایت مغناطیسی مستقل استفاده می کند و دیگر نیازی به عکسبرداری با اشعه ایکس درحین انجام عمل نمی باشد.”
فناوری نوآورانه
برای توسعه سیستم روباتیک، تیم تحقیقاتی باید بر دو چالش بزرگ غلبه میکرد. ابتدا باید دستگاهی می ساختند که کوچک، منعطف و قادر به حرکت در پیچ و خم های آناتومی کلیه مجاری ریه باشد. ثانیاً، آنها به یک سیستم مستقل برای هدایت ربات در جایی که مد نظر دارند نیاز داشتند و تا دیگر نیازی به پزشک برای مانور دستی ابزار در محل را که اغلب شامل نحوه قرار گرفتن بیمار است نباشد.
ربات کوچک و انعطاف پذیر
برای کاهش اندازه ربات و در عین حال حفظ قابلیت کنترل حرکت، محققان آن را از یک سری قطعات استوانهای به هم پیوسته، هر کدام به قطر ۲ میلیمتر و حدود به طول ۸۰ میلیمتر تولید کردند. قطعات از یک ماده نرم الاستومری یا لاستیک مانند ساخته شده بودند که به ذرات مغناطیسی ریز آغشته شده بود.
به دلیل وجود ذرات مغناطیسی، بخش های به هم پیوسته می توانند تا حدودی به طور مستقل تحت تأثیر یک میدان مغناطیسی خارجی حرکت کنند. نتیجتا ایجاد یک ربات شاخک مغناطیسی است که بسیار انعطاف پذیر بوده و قادراست تا با تغییر شکل دادن با توجه به اینکه به اندازه کافی کوچک است به راحتی در مجاری حرکت کند و مانع از گیر کردن در ساختارهای آناتومیک ریه ها شود.
سیستم هدایت
آهنرباهای نصب شده بر روی بازوهای روباتیک در قسمت بیرونی بیمار برای هدایت دستگاه به داخل ریه ها در فرآیندی که برای هر روش طراحی شده است، استفاده می شود. برای تعیین مسیر عبور از مجاری ریه قبل از اجرای عمل ، از ریه های بیمار بوطور برنامه ریزی شده تصویر برداری شده و در سیستم روباتیک برنامه ریزی می شود. همانطور که آهنرباها در خارج از بیمار حرکت می کنند، نیروهایی روی ذرات مغناطیسی در بخش های کاتتر ایجاد می کنند که باعث تغییر شکل یا جهت آنها می شود – و این امکان را به ربات می دهد تا از طریق ریه ها به محل ضایعه مشکوک برسند.هنگامی که ربات به محل مورد نظر رسید، برای نمونه برداری از بافت یا ارائه درمان به شکلی که به این ربات کاربری مشخصی تعریف شده باشد انجام می گیرد. ممکن است چندین سال طول بکشد تا فناوری “شاخک مغناطیسی” در یک بیمارستان در دسترس قرار گیرد.
آزمایشگاه STORM در دانشگاه لیدز در حال متحول کردن فناوری مورد استفاده در تحقیقات آندوسکوپی و کاتتر است. آنها نمونه ای از یک آندوسکوپ ارزان قیمت را ایجاد کرده اند ( ابزاری که برای بررسی دستگاه گوارش فوقانی استفاده می شود) که می تواند در کشورهای کم درآمد تا متوسط که با معضل عدم دسترسی به تجهیزات گران قیمت برنامه های غربالگری مواجه هستند مورد استفاده قرار گیرد.
فناوری مغناطیسی همچنین در قلب سیستم کولونوسکوپی روباتیک قرار دارد که کارکرد آن برای کارکنان آسانتر و برای بیماران راحتتر است.
آزمایشگاه STORM بخشی از مرکز تحقیقات سرطان لیدز است که در اوایل سال۲۰۲۱ راه اندازی گردید.
منبع گزارش:
- Giovanni Pittiglio, Peter Lloyd, Tomas da Veiga, Onaizah Onaizah, Cecilia Pompili, James H. Chandler, Pietro Valdastri. Patient-Specific Magnetic Catheters for Atraumatic Autonomous Endoscopy. Soft Robotics, ۲۰۲۲; DOI: ۱۰.۱۰۸۹/soro.2021.0090
مطالب زیر را حتما مطالعه کنید

اثرات سموم کشاورزی بر روی زنان باردار

آموزش کشت قارچ دکمه ای درخانه
در مورد حیوانات تراریخته چه میدانیم؟


دیدگاهتان را بنویسید
برای نوشتن دیدگاه باید وارد بشوید.